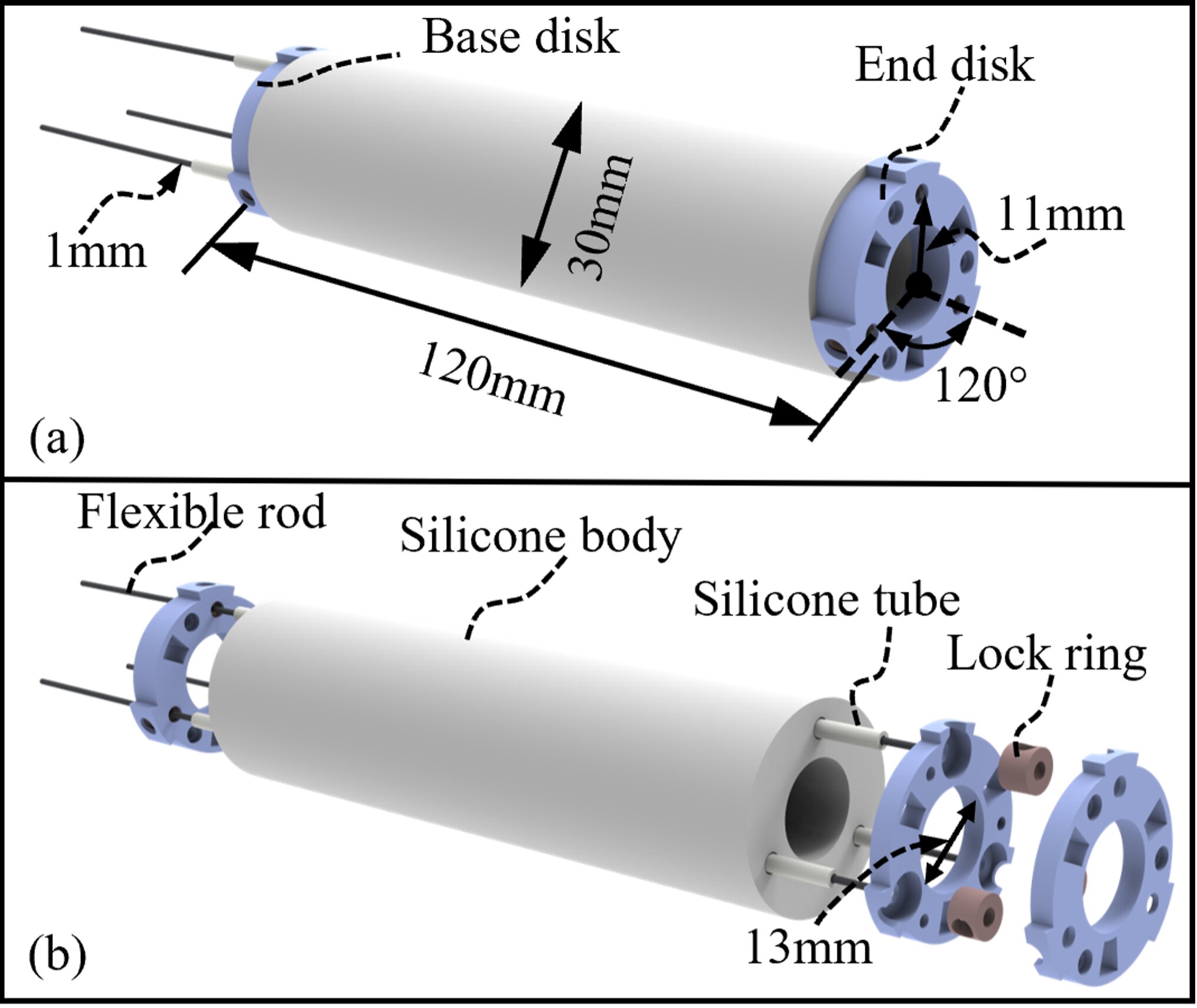
 Design overview. (b) Exploded view. Credit: Wang et al.")
Structure of the rod-driven soft arm. (a) Design overview. (b) Exploded view. Credit: Wang et al.
Soft robots that can complete tasks with high efficiency, accuracy and precision could have numerous valuable applications. For instance, they could be introduced in medical settings, helping doctors to carry out complex surgical procedures or assisting elderly and vulnerable patients during rehabilitation.
Soft robots are more flexible and can deform more. This can result in an increased dexterity (i.e., better manual skills when completing tasks), as well as in a reduction of payload (i.e., the robot capacity to carry a load), because they can produce smaller forces than rigid robotic systems
Researchers at National University of Singapore and Beijing Jiaotong University have recently developed a new rod-driven soft robot (RDSR) that operates through push and pull movements. This robot, presented in a paper published in the IEEE Robotics and Automation Letterscombines the mechanisms of two robotic system previously created by members of the research group.
“A well-balanced performance in terms of dexterity, accuracy, and payload could have great potential in soft robot applications,” Cecilia Laschi, one of the researchers who carried out the study, told TechXplore. “Many studies are focusing on this area and a few works and previous achievements inspired us. For example, in a pioneering research published in Materials Science and Engineering, we developed a soft robot inspired by the octopus, driven by longitudinal and transverse tendons, similarly to the octopus’ muscles.”

Trajectory tracking performances of the open-loop control based on CC and GP model. (a) Case for circular path. (b) Case for square path. Credit: Wang et al.
The previous robot created by Laschi and her colleagues at the BioRobotics Institute of Scuola Superiore Sant’Anna in Italy can emulate the way in which an octopus moves by elongating, shortening and bending its tentacles. Their newly developed system could be particularly promising for completing missions in confined spaces, such as cleaning or explorations, accessing deep cavities and intervening inside the human body.
“The second study that inspired our recent work was my research team’s development of a continuum robot based on push-pull flexible rods,” Peiyi Wang, another researcher involved in the study, explained. “By combining the pure soft body of our octopus-inspired system and the rod-driven arm of Wang’s robot, our new robot aims to achieve a balanced performance in motion accuracy, workspace, DOF, stiffness and active output force.”
The new robot created by Laschi, Wang and their colleagues consists of a silicone soft body, a rigid base, end disks, and three silicon tubes hosting a flexible Nitinol (NiTi)-based rod each. The silicon body, which is integrated in between the base and the end disk, is very soft and flexible, thus it can be easily elongated, shortened and bent.
“Each of our system’s flexible rods can be controlled in both pushing and pulling directions, which is different from tendons with only pulling action,” Wang said. “The rod-driven soft robot (RDSR) can then realize multiple movements in any directions (multiple DOFs), through coordinated control of three push-pull rods.”

Object manipulations performed by our soft robot. RDSR completed pick-and-place tasks with large workspace precise operation. (a) The objects were placed near the boundary of the workspace (task1). (b) An object with a small diameter of 8mm was placed (task2). Credit: Wang et al.
The researchers evaluated their RDSR in a series of tests, comparing its performance to that of a silicone-based tendon-driven soft robot (TDSR). They found that their new robotic system was stiffer and could operate within a broader workspace (from 2.6 to 5.2 times larger).
In contrast with the TDSR they compared it too, their robot could actively apply pushing perpendicular forces onto an inclined plane, and could also complete tasks that involve object manipulation. Combined, all these findings suggest that the new robot could be more effective in completing tasks that entail picking up and placing objects within larger spaces and with high levels of precision.
“The movement obtained with bidirectional, push-pull actuation is original,” Laschi said. “It gives the soft robot a more accurate control. A notable implication of our work is its potential to enable balanced performance in terms of dexterity, accuracy and payload.”
In the future, the new RDSR system created by this team of researchers could help to tackle complex tasks more efficiently and reliably, achieving higher levels of precision. In their next studies, Laschi and her colleagues would like to test the robots’ effectiveness for biomedical applications, including surgery, rehabilitation and elderly care.
“We also plan to improve the soft arm we created on other aspects that are not strictly related to its design and mechanics, but to the control of its movements,” Laschi added. “Adding and modeling distributed proprioception, i.e., the perception of the arm’s own posture, is a challenge to address, as well as robust sensing system for detecting contact forces.”
Configuration and manipulation of soft robotics for on-orbit servicing
Peiyi Wang et al, Design and Experimental Characterization of a Push-Pull Flexible Rod-Driven Soft-Bodied Robot, IEEE Robotics and Automation Letters (2022). DOI: 10.1109/LRA.2022.3189435
Peiyi Wang et al, Design and Analysis of a Novel Variable Stiffness Continuum Robot With Built-in Winding-Styled Ropes, IEEE Robotics and Automation Letters (2022). DOI: 10.1109/LRA.2022.3171917
M. Cianchetti et al, Design concept and validation of a robotic arm inspired by the octopus, Materials Science and Engineering: C (2010). DOI: 10.1016/j.msec.2010.12.004
© 2022 Science X Network
Citation:
A flexible, rod-driven soft robot for biomedical applications (2022, August 11)
retrieved 13 August 2022
from https://techxplore.com/news/2022-08-flexible-rod-driven-soft-robot-biomedical.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.






:quality(70)/cloudfront-eu-central-1.images.arcpublishing.com/irishtimes/CGYPT6WE7VAO3KJ773SHUVMVBY.jpg?resize=1200,630&ssl=1)



