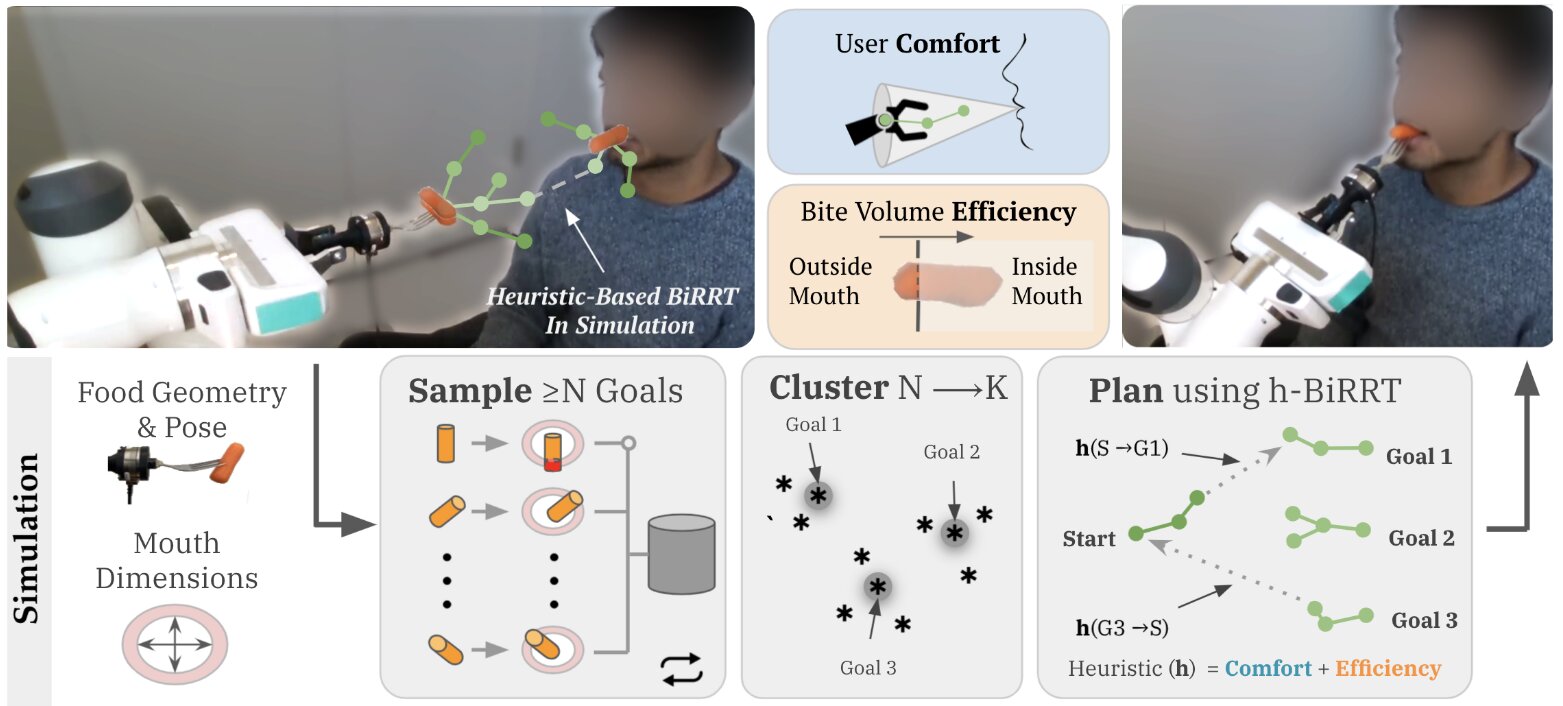
 and bite volume efficiency (orange) heuristics. Credit: Belkhale et al.")
The team’s method finds feasible bite transfer trajectories in simulation. Given the food geometry and pose on the fork, we sample at least N goal food poses that are checked for collisions with the mouth geometry using a learned constraint model. Next, we cluster the goal poses and use heuristic-guided BiRRT to reach cluster centroids with comfort (blue) and bite volume efficiency (orange) heuristics. Credit: Belkhale et al.
Robots could be invaluable allies for older adults and people with physical disabilities, as they could assist them in their day-to-day life and reduce their reliance on human carers. A type of robotic systems that could be particularly helpful are assisted feeding or bite-transfer robots, which are designed to pick up food from a plate and feed humans who are unable to move their arms or coordinate their movements.
While many research teams worldwide have tried to develop robot-assisted feeding systems, most existing solutions do not consider how comfortable a user will feel when receiving a bite of food from the robot. In other words, these systems can be efficient at grasping and transferring foods of different shapes and sizes, but they do not consider how the bite will be received by users, for instance whether the robot will invertedly poke the user’s face or mouth with the fork while delivering the bite.
Researchers at Stanford University, University of Washington and Cornell University recently developed a new framework that tries to achieve an optimal balance between the efficiency and comfort of robot-assisted feeding systems. Their approach, introduced in a paper pre-published on arXiv, is based on a computational method known as ‘heuristics-guided bi-directional rapidly exploring random trees (h-BiRRT).
“A lot of our previous work in this space focused on the problem of just picking up food off a plate,” Ethan K. Gordon, one of the researchers who carried out the study, told TechXplore. “Basically, the robot would bring the food close to the mouth and call it a day. However, in both formal and informal demos, new users would almost always express discomfort with the approach. It’s a fork, a sharp utensil, so the discomfort is understandable.”

Spatial comfort cost (red higher, green lower). The steeper cost gradient in the upward direction than downward ensures trajectories near the face have high “comfort” cost. Credit: Belkhale et al.
Building on their previous studies, Gordon and his colleagues set out to explore whether they could improve the comfort of robotic feeding systems. The overall objective of their recent paper was to better understand the feeling of discomfort reported by users doing trials and find a way to mitigate it.
Their approach works by identifying promising bite transfer trajectories in simulations. Concurrently, it also considers the geometry of the food and the pose of the fork, to ensure that it minimizes collisions with a user’s mouth.
“Our approach considers comfort directly,” Gordon explained. “Balancing it with ‘efficiency’ (i.e., how much of the food the user is able to theoretically take off the fork), we add it as an explicit cost heuristic to our motion planner.”
The team evaluated their new robot-assisted bite transfer framework in a series of real-world evaluations, using a Franka Emika Panda robotic arm. This system consists of a fork attached to an ATI Mini45 6-axis F/T sensor, via a 3D printed mount. The robot also integrates an external Intel Realsense RGB-D camera.
“Remarkably, we found that users significantly preferred the transfers produced by our approach to those produced by a baseline method,” Gordon said. “Our findings imply that a well-designed heuristic can go a long way towards making HRI systems more comfortable for the human collaborators with relatively little additional complexity on the robot side.”
In the future, the new approach could enhance the comfort of automated feeding systems, facilitating their deployment in healthcare facilities and other real-world settings. Meanwhile, Gordon and his colleagues plan to develop their framework further, for instance by making the robot more responsive to a user’s movements during the bite transfer itself.
“For example, we plan to focus on questions like: how should the robot adjust the trajectory if the user leans in to grab the food?” “Also, our recent work focused primarily on carrots and other analogous, hard, cylindrical foods. We definitely need to design a system that is able to handle foods of all different shapes and viscoelasticities.”
A bite acquisition framework for robot-assisted feeding systems
Suneel Belkhale et al, Balancing efficiency and comfort in robot-assisted bite transfer. arXiv:2111.11401v1 [cs.RO], arxiv.org/abs/2111.11401
© 2022 Science X Network
Citation:
A framework to optimize the efficiency and comfort of robot-assisted feeding systems (2022, January 17)
retrieved 17 January 2022
from https://techxplore.com/news/2022-01-framework-optimize-efficiency-comfort-robot-assisted.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.