
Credit: Costa et al.
Developing robots inspired by animals and other biological systems has become a key research focus for many roboticists worldwide. By artificially reproducing biological mechanisms, these robots could help to automate complex real-world tasks in efficient and reliable ways.
Researchers at Università Politecnica delle Marche in Italy have been trying to devise effective bio-inspired robots for several years now. In a paper recently published in MDPI Robotics, they introduced an innovative labriform underwater robot that could be used by archaeologists and other scientists to remotely explore underwater environments.
“I have been dreaming of designing a bionic companion since I saw the robotic flying dinosaur created by Prof. Falken in the famous ‘WarGames’ movie as a kid,” Daniele Costa, the lead researcher for the study, told TechXplore. “I have thus been working on biomimetics since my graduation thesis, developing an idea born from the ingenious mind of my colleague and best man, Prof. David Scaradozzi, and later during my Ph.D. with my research group guided by Prof. Massimo Callegari.”
The key objective of most of the recent studies conducted by Costa and his research group is to develop an autonomous vehicle or robot that can swim underwater. To achieve this, they have been drawing inspiration from the fluid dynamic principles underpinning the locomotion of fish and other marine animals.

Credit: Costa et al.
“Fish propulsive performance is far beyond the state of the art of modern nautical technology in terms of propulsion capability, acceleration and maneuverability,” Costa explained. “However, the intent of our project is not the design of a bionic mackerel; that would be mimicking nature, which differs from biomimetics. Creating a robotic fish that includes all the features of its biological counterparts remains a necessity when the purpose is to investigate the fluid mechanics of swimming.”
Generally, bio-inspired robotic designs try to exploit biological mechanisms enabling the locomotion of animals to overcome issues impairing the performance of robots or vehicles. For instance, they could try to replicate specific mechanisms attaining power-efficient cruising and maneuverability.
“Our study was a long journey full of obstacles,” Costa explained. “We started from scratch with almost no experience in the field of biomimetics. We also lacked resources in terms of manufacturing capabilities, mathematical models, and simulators. Luckily, we had plenty of time and enthusiasm, so we started collecting resources like 3D printers, and we developed our simulation and design platform, the same we used in our last paper.”
In addition to designing bio-inspired systems that can be implemented in real-world environments, Scaradozzi, in collaboration with ANcybernetics (a start-up associated with his lab) has been creating prototypes of robotic systems that could be used to teach science, technology, engineering, and mathematics (STEM) in primary and secondary schools. The robot prototype they are using for educational purposes is shaped like a fish, to raise awareness among new generations about protecting marine animals and their environments.

Credit: Costa et al.
The idea for the labriform robot introduced in their recent paper came to Costa while he was completing his Ph.D. studies. As the systems he was working on at the time had limited maneuvering capabilities, he decided to devise a rowing system that would allow them to turn in the water while still.
“Unfortunately, at the time I lacked the necessary time to develop my solution, until the recent pandemic lockdown forced me to stay home for a couple of months,” Costa said. “During that period, I designed the pectoral fins driving mechanism presented in our paper.”
The new robot created by the researchers can turn in the water using a mechanism that resembles that of a rowing boat. More specifically, its pectoral fins move in opposite directions, creating drag forces that combine in a steering torque. This “rowing” mechanism resembles the one observed in many marine animals as they are hunting and feeding underwater.
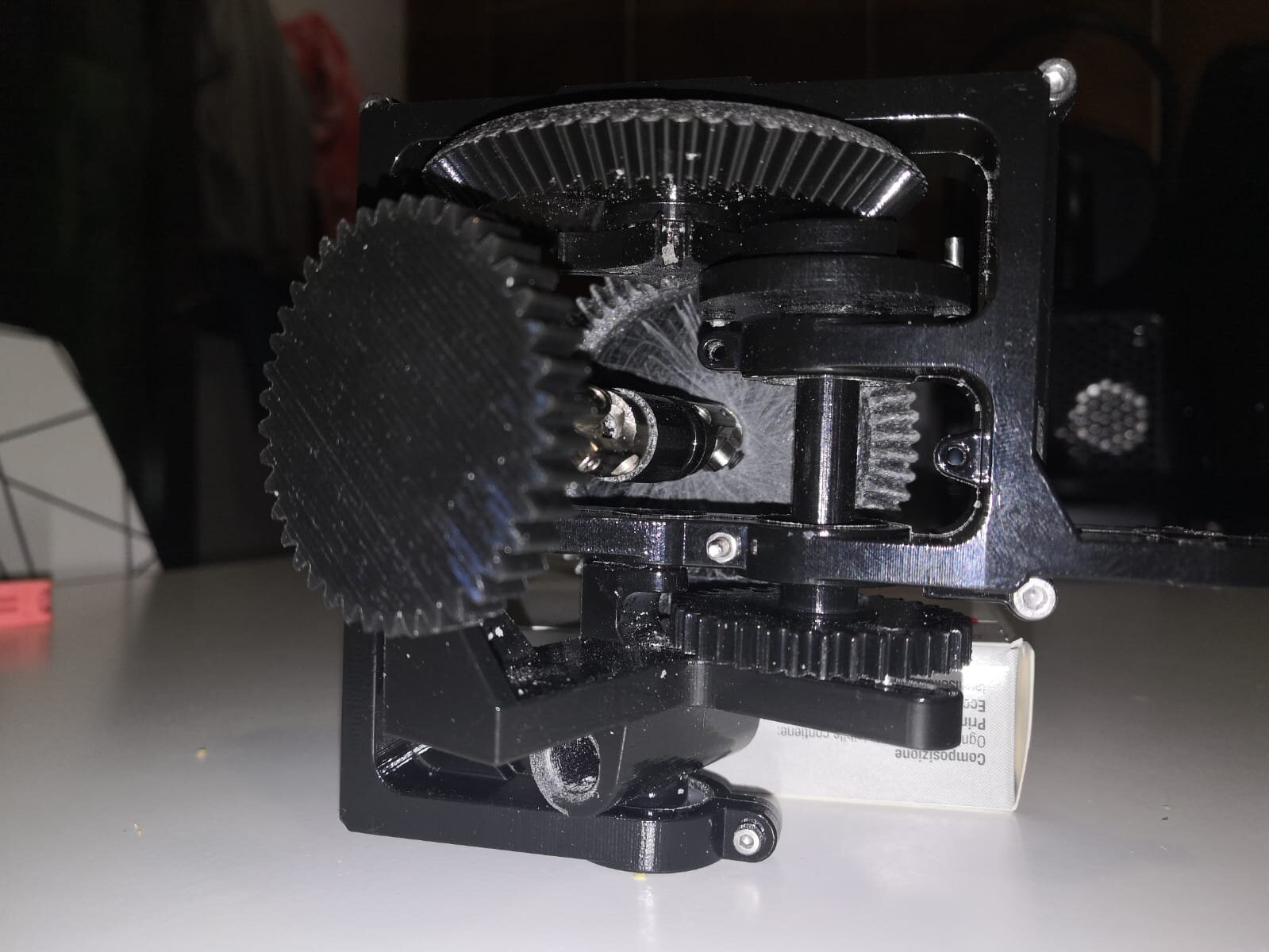
“Previously proposed robotic fish can use up to four servomotors to drive their fins,” Costa explained. “On the contrary, our design has a single motor. Aside from a reduction in encumbrance and inertia, the main improvement of our solution is the system’s inherent synchronization between left and right fins. Waterproofing issues are also minimal because only one motor needs to be sealed.”

Credit: Costa et al.
So far, Costa and his colleagues evaluated their system in a series of tests ran within a multiphysics simulated environment. In these tests, their robot appeared to be faster, sturdier, and more reliable than other underwater robots developed in the past.
“Over millions of years in a vast and often hostile realm, fish have evolved propulsive capabilities far superior in many ways to what has been achieved by nautical technology,” Costa said. “Underwater vehicles typically use propellers to generate the necessary thrust. However, marine environment applications require devices that can combine both good maneuverability and high cruising speeds. Propeller-driven vehicles are not capable of combining both.”
Most underwater robots change the direction in which they move underwater with a turning radius that is several times larger than their length. While their maneuverability can typically be improved by adding more propellers to their body, this can also increase the drag forces acting on the robots and reduce their cruising speeds.
“Marine environments are also populated by a wide variety of vegetation that propellers can damage,” Scaradozzi explained. “In contrast with other existing solutions, an underwater vehicle implementing natural locomotion techniques could achieve velocities in the order of five vehicle-lengths per second, with a turning radius of less than a vehicle length, while not disturbing unnaturally the environments through which it navigates.”

Credit: Costa et al.
In the future, the new robot introduced by this team of researchers could have a wide range of valuable applications. For instance, it could be used to monitor coasts, check offshore infrastructure or installations, and gather data at archaeological sites or in delicate marine environments. Prof. Scaradozzi has been active for over fifteen years in the fields of marine environment protection and archaeological sites documentation, in cooperation with the Italian Ministry of Cultural Heritage.
“The project is at the beginning of the testing phase,” Costa added. “Nevertheless, we must wait for milder weather before actual tests may begin. We now plan to expand our multiphysics platform further to implement depth changing and restoring maneuvers. Concurrently, we will continue spreading the culture of sea protection among new generations, using our educational tool.”
To swim like a tuna, robotic fish need to change how stiff their tails are in real time
Daniele Costa et al, Design of a Labriform-Steering Underwater Robot Using a Multiphysics Simulation Environment, Robotics (2022). DOI: 10.3390/robotics11010011
© 2022 Science X Network
Citation:
A labriform swimming robot to complete missions underwater (2022, February 22)
retrieved 22 February 2022
from https://techxplore.com/news/2022-02-labriform-robot-missions-underwater.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.