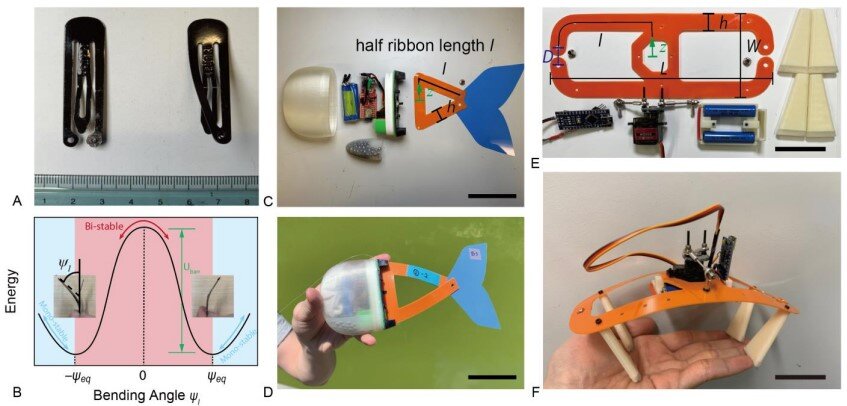
 and its applications to untethered soft robots. (A) and (B) The structure and energy landscape of a bistable steel hair clip, respectively. (C) and (D) The components and assembly of the untethered robotic fish with uni-sided triangular HCM as fish tail. The fish swims at a speed of 2.03 BL/s (436 mm/s) (E) The components of the untethered biped compliant robot with a bilateral HCM chassis. Dimensions of the dual-HCM plastic chassis are l = 129.1 mm, L = 200.6 mm, W = 75 mm, D = 16 mm, h =15 mm, and sheet thickness t = 0.381 mm. (F) The assembled HCM bi-stable robot in its flexion state with a total length of Lf = 176.5 mm. Scale bar = 5 cm. Credit: <i data-recalc-dims=") arXiv (2022). DOI: 10.48550/arxiv.2210.02352″ width=”800″ height=”406″/>
arXiv (2022). DOI: 10.48550/arxiv.2210.02352″ width=”800″ height=”406″/> Principle of the hair-clip mechanism (HCM) and its applications to untethered soft robots. (A) and (B) The structure and energy landscape of a bistable steel hair clip, respectively. (C) and (D) The components and assembly of the untethered robotic fish with uni-sided triangular HCM as fish tail. The fish swims at a speed of 2.03 BL/s (436 mm/s) (E) The components of the untethered biped compliant robot with a bilateral HCM chassis. Dimensions of the dual-HCM plastic chassis are l = 129.1 mm, L = 200.6 mm, W = 75 mm, D = 16 mm, h =15 mm, and sheet thickness t = 0.381 mm. (F) The assembled HCM bi-stable robot in its flexion state with a total length of Lf = 176.5 mm. Scale bar = 5 cm. Credit: arXiv (2022). DOI: 10.48550/arxiv.2210.02352
A trio of researchers at Columbia University has developed a very simple, small, soft-bodied robot based on hair-clip technology. Zechen Xiong, Yufeng Su and Hod Lipson have written a paper available on arXiv describing the idea behind their robot design and the two robots they built.
As scientists continually look for new ways to build small, soft-bodied robots, they often turn to existing animals or other devices that maximize simplicity and energy efficiency. In this new effort, the researchers noticed, as have many others, that a certain kind of hair clip can exist in one of two states—bent one way or the other; moving between the two states requires little energy and it happens quickly. Inspired by the simplicity of the design, they created the basis of a robot.
The basic design consisted of cutting a flat, bendable piece of plastic into the form of an exaggerated C. They then pulled the two open ends of the plastic piece close to one another and fastened them together. This was all it took to emulate a hair-clip. They next attached a small motor to apply the pressure that is normally applied by the fingers to a hair clip. Using a small amount of electricity, the servo motor could push the plastic into one or the other of its shapes, and it would happen just as quickly as with a hair clip.
Next, the researchers added foot-like appendages to complete their robot. Using the motor to push the frame between states pushed the feet back and forth, allowing the robot to walk across a hard surface. Testing showed it was able to walk at a top pace of 313 mm/sec which translated roughly to 1.6 body lengths per second. They also fashioned their frame into a fish-like robot and found it could make its way through the water at approximately 435 mm/second, which translated to approximately two body lengths per second. The researchers claim both speeds are faster than other, similar robots.
The researchers are planning to demonstrate their robots at this year’s International Conference on Robotics and Automation.
Zechen Xiong et al, Fast Untethered Soft Robotic Crawler with Elastic Instability, arXiv (2022). DOI: 10.48550/arxiv.2210.02352
arXiv
© 2022 Science X Network
Citation:
A speedy untethered soft robot based on hair-clip technology (2022, December 7)
retrieved 11 December 2022
from https://techxplore.com/news/2022-12-speedy-untethered-soft-robot-based.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.