 Science Robotics (2022). DOI: 10.1126/scirobotics.abo4401″ width=”800″ height=”530″/>
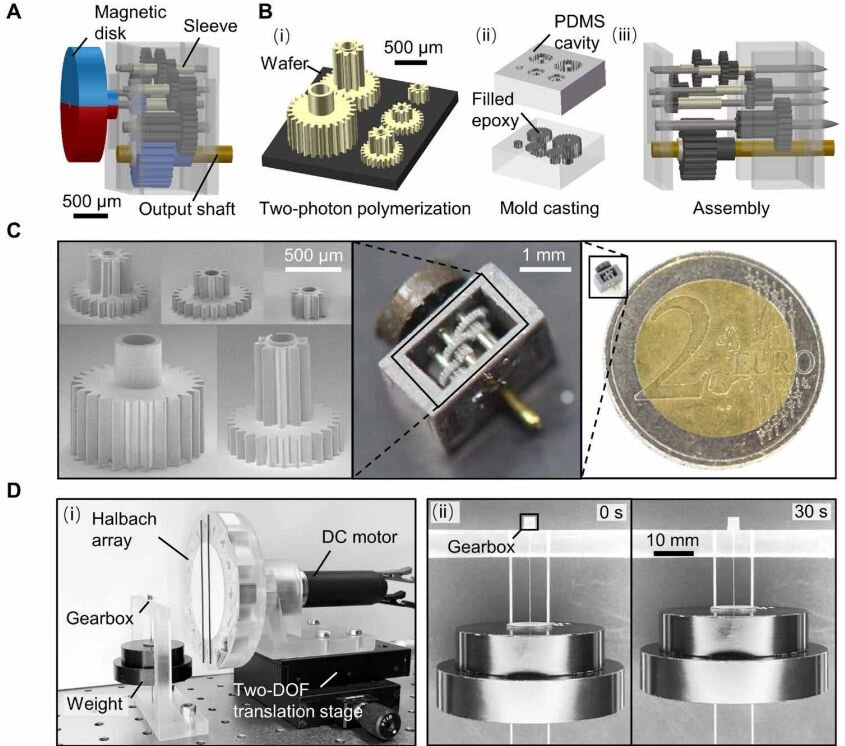
Science Robotics (2022). DOI: 10.1126/scirobotics.abo4401″ width=”800″ height=”530″/> Design and performance of the magnetically actuated miniature gearbox for millimeter-scale magnetic actuators. Credit: Science Robotics (2022). DOI: 10.1126/scirobotics.abo4401
A team of researchers at the Max Planck Institute for Intelligent Systems, working with a pair of colleagues from the Harbin Institute of Technology, has developed a tiny actuated gearbox that can be used to give very tiny robots more power. In their paper published in the journal Science Robotics, the group describes how their gearbox works and the power improvements observed in several types of tiny robots.
Over the past several years, scientists have been working toward the development of tiny robots that can be injected into the human body to carry out medical procedures. The hope is that such robots can be sent to find and destroy cancerous tumors, for example. Such tiny robots are too small to carry their own power plant; thus, they must be manipulated using an external magnetic field. Unfortunately, as the robots grow ever tinier, their power diminishes as they have too little mass. In this new effort, the researchers have found a way to increase the power of the tiny robots using a tiny gearbox that helps them become stronger.
The gearbox comes with a magnet on its end to harness the power in a magnetic field via the gears in the box. And the gearbox is able to magnify the power of a robot using clever features including elastic components and mechanical linkages.
To use the gearbox, the tiny robots must be built in a way to take advantage of them. For example, by combining elastic components with mechanical linkages, spring-like energy can build up pressure and then release it all at once. The mechanical linkages serve to hold the elastic components in place until it is time to release the energy.
To test their idea, the researchers built box-like structures with elastic wall parts that were slowly compressed by the gearbox when it was exposed to a magnetic field. A mechanical linkage held the walls in place to allow the pressure to build. When a certain amount of pressure was reached, the walls were released, pushing the robot in a desired direction. To create a robot, several of the box-like structures were hooked together. Using this approach, the researchers were able to create winch-type robots able to lift up to 103 grams, or jumpers that reached 119 millimeters. They also created crawlers and clampers.
Watch tiny electromechanical robots that are faster than cheetahs for their size
Chong Hong et al, Magnetically actuated gearbox for the wireless control of millimeter-scale robots, Science Robotics (2022). DOI: 10.1126/scirobotics.abo4401
© 2022 Science X Network
Citation:
A tiny, magnetically actuated gearbox that gives microrobots more power (2022, September 1)
retrieved 27 September 2022
from https://techxplore.com/news/2022-09-tiny-magnetically-actuated-gearbox-microrobots.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.